 研究方向
研究方向研究意义:测量技术对信息进行采集和处理,是信息技术的源头。复合正交与多传感协同智能坐标测量技术,集成多测量架,协同多种传感系统,实现同一零件不同几何要素的同步测量,可以满足生产现场快速自动化测量需求,是实现信息化、智能化和超精密制造的前提。
研究内容:
1.复合式多传感器协同测量技术
2.视觉传感器和接触式传感器的联合标定技术
3.多轴测量系统的建模及标定技术
4.多传感器联合测量技术:基于视觉传感器的快速路径规划、多传感器测量方案的最优设计
5.测量系统运动控制技术
6.缸套活塞环全尺寸在线测量技术

研究意义:从摆放式、固定式到高机动平台是光电跟瞄系统发展的重要发展趋势,然而高机动平台会对稳定跟瞄引入极难克服的高频振动干扰,使用传统复合轴跟瞄系统难以实现微弧度甚至亚微弧度级的稳瞄精度。当前,复合轴跟瞄与惯性参考单元相结合的方式是抑制动载体振动干扰,提升跟瞄精度的主要技术手段。惯性参考单元是一个可实现两个方向小角度偏转的平台,利用其上安装的惯性传感器组感知载体振动,反馈控制位于两个正交方向上的推拉驱动机构,实现平台上参考光束的高精度惯性稳定。
研究内容:
在国家自然科学基金重点项目(61733012)、国家自然科学基金青年项目(62203322)等课题的支持下,开展以下核心技术攻关:
1)基于多传感器数据融合的宽频(0.01Hz-1kHz)微角振动测量方法;
2)宽带约束下的两自由度柔性支承结构设计与优化方法;
3)嵌入式驱控一体的控制器设计与研发;
4)补偿系统不确定性及窄带大幅值扰动的抗扰控制算法;
5)装配误差、环境变化等对控制精度的影响机理分析与抑制方法。

IRU样机振动抑制效果示意图
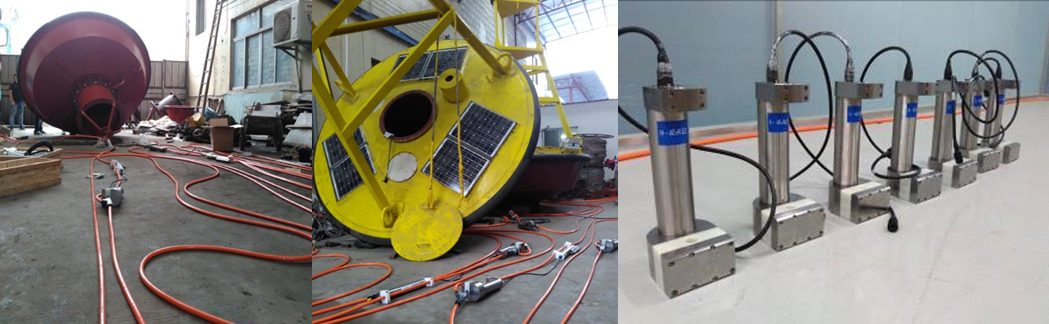
研究意义:全天候定点实时观测平台,借助耦合电能和数据并行实时传输关键技术,实现水面、水下设备进行全天候、实时监测,为海洋环境分析提供实时准确的信息。项目组研制的传输系统实现了对200米水下海洋环境参数的剖面测量。将非接触电能和数据传输同时运用于浮标水下剖面参数测量,尤其是长距离的电能和数据实时传输,国内外研究极为稀少,利用该技术完成水下200米环境剖面测量在国内外尚属首次。
研究内容:
1.基于系留缆的耦合电能和数据并行传输策略;
2.高速、大功率水下耦合电能数据传输模块研制;
3.多负载系统电能稳定传输的控制策略研究。
研究意义:研制了具有完全自主知识产权的半实物仿真系统,模拟了自持式剖面浮标在真实海洋环境中的循环剖面运动,形成了自持式剖面浮标全性能测试流程。通过导入海洋环境数据,结合浮标动力学模型与流体模型,快速实现自持式浮标剖面运动的模拟,提升了浮标的可靠性和稳定性,极大降低出海成本,提高了生产效率。
研究内容:
1.精准的高压伺服阀控制,保证系统输出压力跟随海洋环境数据;
2.交互性强的测试软件,并具备加速运行功能,极大提升测试效率;
3.软件流程与实物相结合的半实物仿真操作,在实验室条件下完成浮标95%以上的性能测试。

研究意义:“浮星”深海自持式智能浮标的研制,旨在快速、准确、大范围地收集全球海洋的海水温度、盐度等剖面资料,有效防御全球日益严重的气候灾害给人类造成的威胁。“浮星-4000”的连续稳定运行与实时可视化监控,标志着我国在4000米深海自持式剖面浮标的实用化道路上迈出了关键一步,极大地推动了我国在4000米深海自持式剖面浮标的实用化进程。“浮星-6000”的研制,将进一步提升我国在国际上的竞争能力与地位。
研究内容:
1.高效的液压泵浮力驱动技术,实现浮标自主下潜、上浮和定深悬停;
2.超低功耗的能源管理机制,极大延长浮标监测的寿命;
3.通信模块的强度检测,提高浮标在复杂海况下通讯的可靠性;
4.建立完善的调试与监测条件,实现浮标与岸基终端的双向交互控制。

研究意义:
惯性测量单元(IMU)作为惯性导航系统的核心元件,不需要与外界通讯,即可得到载体的位姿信息,实现自主导航。在激光通信卫星、遥感成像卫星等天基光学平台中,内部机械运动与太空物理环境产生的千赫兹微角振动会导致光束稳定性变差、成像分辨率降低,因此平台需要获取这些微角振动信息进行反馈补偿。基于磁流体动力学(MHD)的新型微角振动传感器尤其适合空间高频微角振动的测量,MHD微角振动传感器与MEMS陀螺仪共同作为惯性测量单元的角速度敏感元件,MHD微角振动传感器还起到监测载体高频振动信号的作用,加速度计用于测量载体坐标系下各敏感轴的加速度信息,再获取载体的角速度信息、振动信息、加速度信息后,通过算法处理完成误差补偿,得出位姿信息。
研究内容:
1)高精度角速度信息获取与融合机制;
2)含MHD微角振动传感器的惯性测量单元台体结构设计及优化方法
3)姿态解算的嵌入式平台设计与开发
4)圆锥误差环境下姿态解算算法的改进
5)引入MHD微角振动传感器的IMU与传统IMU姿态解算误差的对比分析
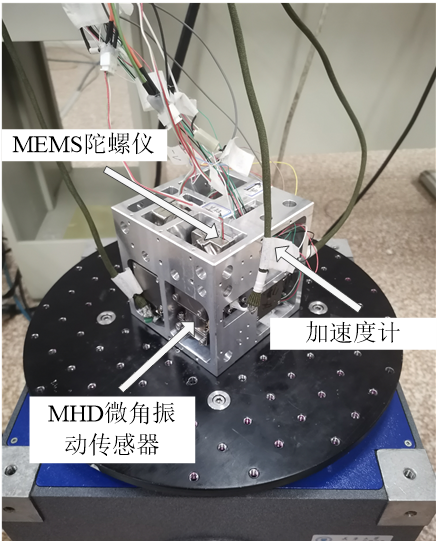
宽频惯性测量单元
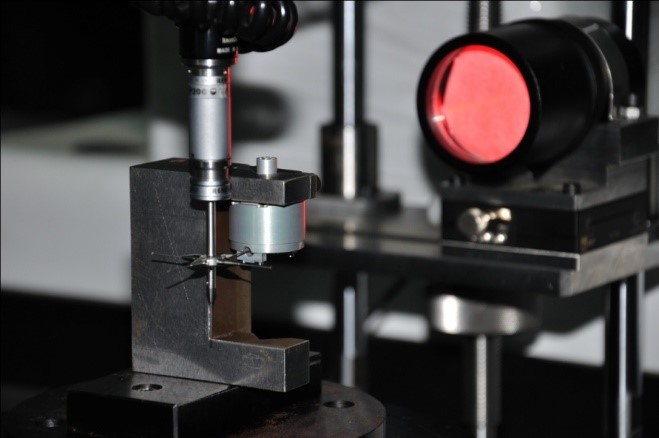
研究意义:MHD微角振动传感器具有体积小、质量轻、响应快等特点,能够在线实时反映被测对象的角振动信息,对于提高我国卫星平台的稳定性、有效载荷的成像质量以及深空光学通信技术水平起到基础保障作用。
研究内容:建立了MHD微角振动传感器的修正简化模型,提出了MHD微角振动传感器中二次流、诱导磁场和磁场均匀性等误差源的建模方法,量化分析了误差源对传感器输出的影响,并利用相关法和Allan方差法分析MHD微角振动传感器的本底噪声特性,完成了三代原理样机的研制。目前处于进一步拓宽MHD微角振动传感器带宽并降低噪声的阶段,研究的重点集中在多物理场(流场、电磁场、热场、微重力场等)耦合仿真技术、nV级微弱信号检测技术及高频角振动溯源方法,处于工程样机的研制阶段。

MHD-02D


MHD-03 MHD-04